From Heron's ancient music machine to Spot the intelligent robot dog to AI that learns to walk on its own, robotics has made great leaps since industrialization. The technologies designed to make our everyday work easier are becoming ever more advanced.
One hundred years have passed since the vision of future technology entered irrevocably into the self-image of mankind. It all began with a literary neologism that expressed the essence of the new technological achievements: robots.
But it was not to remain a mere science fiction fantasy. With the emerging technological progress of the modern age, the possibility of machines imitating human actions and behaviors in everyday life became ever more tangible. A history of robotics.
The age-old idea of artificial humans
Today's robotics deals with the technologies that replace human interaction with the environment with electromechanical machines. Its operation is based on sensors that collect information, a processor that processes it, and actuators: they transform signals into mechanical processes.
According to Stuttgart-based technology philosopher Catrin Misselhorn, a robot's behavior is autonomous or at least appears to be - unlike computers, robots can interact with and influence their environment.
But the idea of autonomously acting, often human-like apparatuses is ancient: Humanoid machine beings already appeared in Greek mythology in the 4th century BCE and were also mentioned in ancient Daoist texts dating back to 250 BCE. And in the 1st century CE, the mathematician Heron of Alexandria wrote the work Automata, in which he described automatic devices that were sensational for the ancient world.
Numerous other examples can be found around the world: Around 1200, the Arab scholar Al-Jazari invented, among other things, a mechanical waiter that could pour wine and an automatic hand-washing machine. Leonardo da Vinci sketched a mechanical knight in the 16th century, mechanical Karakuri puppets provided entertainment at home in 18th- and 19th-century Japan, and the Spanish engineer and mathematician Leonardo Torres Quevedo developed the first chess automaton around 1910.
Word creation with lasting effect
The term "robot" originally came from a 1920 play by Czech playwright Karel Čapek, who intended it to describe the phenomenon of artificial humans.
Against the backdrop of increasing industrialization and the need for mass production after World War I, he envisioned how synthetically produced humanoid creatures would be created in the near future to take over human tasks in factories and on war fields to increase productivity. Originally built as slaves, they would one day gain power over humanity through revolution and wipe it out.
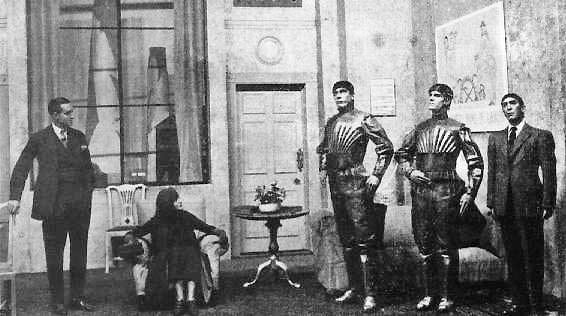
Čapek's science fiction play titled R.U.R. - Rossum's Universal Robots was first performed in Prague in January 1921. Soon after its world premiere, it achieved great popularity and was translated into thirty languages within two years.
Karel Čapek came up with the term "robot" through his brother Josef, who suggested the Czech word roboti, meaning a serf or forced laborer, for artificial humans. The neologism replaced older terms such as "automaton," "mechanical man," or "android."
Man, machine - or both?
Čapek's robots were made of synthetic, organic material, and thus differ from our current view of robots as purely inorganic machines. According to today's definition, the term android would be more appropriate for Čapek's figures: These are humanoid robots, often made of artificial organic material, which originally came from the field of science fiction.
First mentioned in the Oxford English Dictionary in 1728, androids were presented in exhibitions in the late 18th century as advanced mechanical devices that resembled humans and could perform their tasks. It was not until further cultural thematization, primarily in English-language pulp magazines of the 1930s and '40s and in the works of writer Isaac Asimov in the '40s and '50s, that the conceptual distinctions became more pronounced.

A human hybrid version - with both organic and inorganic body parts - are cyborgs (short for cyberneticorganism), which have advanced capabilities through their integrated technologies or artificial components. In this sense, therefore, humans with pacemakers, defibrillators, complex prostheses, or other electronic implants can already be considered cyborgs.
World War I: the origin of robotics
World War I first raised awareness that humanity could work toward its self-destruction through new technological inventions - automated technology such as armored cars, machine guns, and remote-controlled weapons were examples of such technologies used in war.
At the same time, considering many casualties, the idea of replacing soldiers with robots in the next impending war gained momentum to prevent the loss of human life.
Čapek's work also contributed significantly to the debate on the extent to which technologies could liberate workers and perform physical labor. The automated slaves were supposed to create paradisiacal circumstances in the once hard everyday work of the workers, generate prosperity and establish social peace, to thus abolishing the struggle of modernity between capital on the one hand and hard labor on the other.
The robot is a friendly helper of man
At the end of the 1920s, the Japanese biologist Makoto Nishimura made an optimistic attempt to create an artificial human being harmonizing with nature and humanity. In contrast to Čapek's dystopian fantasy of the future, Nishimura's robot was an inspiring friend to man rather than his slave.
Gakutensoku (Japanese for "learning from the laws of nature") could adopt different facial expressions, move its head and hands, and even write words thanks to an air pressure mechanism. He was first presented in Kyoto in September 1928.
Other humanoid robot models with rhetorical abilities were created at the same time in Great Britain, and about ten years later the robot Elektro was presented in the USA, which had a vocabulary of 700 words, could smoke cigarettes, and carried a yapping robot dog named Sparko.

Through Russian-American science fiction author Isaac Asimov, the notion of humanoid robots gained further popular currency. Central to this was Asimov's 1942 short story Runaround, in which he first used the term "robotics." In it, he formulated three basic robot laws that would serve to protect humanity from new technologies. They were:
- A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- A robot must obey the orders given by human beings except where such orders would conflict with the First Law.
- A robot must protect its existence as long as such protection does not conflict with the First or Second Laws.
Asimov's vision of a robotic society was also far more benevolent than the notion of an unreliable machine as described by Čapek in his dystopian play. The writer, who was already world-famous at the time, considered robots to be useful assistants to humans. In some of his works, he even described them as a "better, purer species" compared to humans.
Progress in robots after the Second World War
After the first robot-like devices had already been used in industrial production in the USA in the 1930s, Konrad Zuse made the final push for humanoid machines, which we would call robots in today's terms, with his programmable computer in 1939.
The first digital and programmable robots were then constructed in the 1950s by George C. Devol, an inventor from Kentucky in the USA, and used for automobile manufacturing.
Here, the Unimate industrial robot took over tasks in the die casting process that posed a safety risk for humans. The company Unimation, which was founded soon after, laid the foundation for the success of robots in the automotive industry and therefore in industrial robotics.
First shaky steps
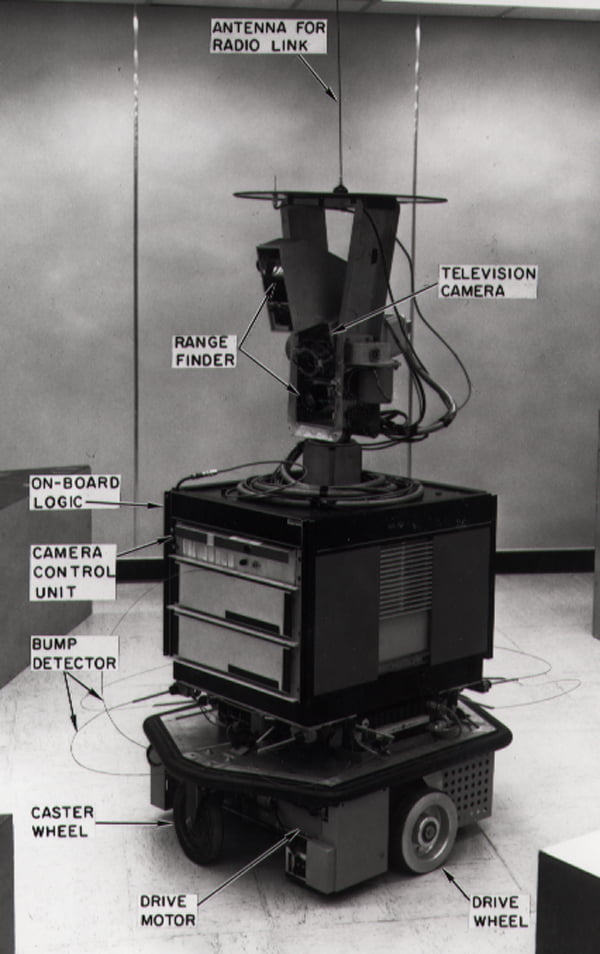
From about 1966 to 1972, the Silicon Valley-based Artificial Intelligence Center of the Stanford Research Institute developed the first mobile robot. True to its name, Shakey the Robot was more like a slow, shaky tower on wheels that could sense its surroundings and orient itself thanks to a camera and sensors.
The pinnacle of his abilities was flipping light switches and door handles, negotiating obstacles, and pushing objects around. But it was actually this wobbly model that heralded the beginning of the robot revolution and, with its research findings, was to pave the way for further groundbreaking developments.
The "personal robot" WABOT (WAsedaroBOT) was developed at Waseda University in Tokyo in the 1970s and was equipped with systems for vision and speech as well as body movements.
It had artificial ears, eyes, and a mouth, and could communicate in Japanese and measure distances and directions using external receptors. Tactile sensors on its hands enabled it to grasp and move objects. WABOT-1 was estimated to have the intelligence of an 18-month-old infant, taking 45 seconds to take a single step.
Less versatile, but equipped with dexterity and a sense of music, was the WABOT-2 model developed in the 1980s. Specializing in keyboard playing, this musician robot could communicate with humans, read music and play melodies of average difficulty on an electronic organ.
In the mid-1980s, Honda launched a program for humanoid robots, and by the late 1990s had developed the P1 to P3 series of robots that could move around smoothly, wave, and shake hands.
Video: Honda's P3 greets a human audience in 1997.
The culmination of this research happens in 2000 with the famous bipedal Asimo (Advanced Step in Innovative MObility) named after Isaac Asimov, whose newer models can now even speak sign language in several languages, climb stairs, jump on one leg, and dance.
Robots as entertainment toys
In 1999, Sony introduced a new high-tech toy, the robot dog Aibo. Parents who wanted to offer their children this barking, tail-wagging entertainment had to dig deep into their pockets for the dog, including additional software: the high-tech toy cost a proud $2,500, and its behavior could also be trained according to the "reward and punishment" scheme.
Aibo was followed by another robot designed by Sony as a social friend for children. Standing just under sixty centimeters tall, Qrio (short for "Quest for Curiosity") was the first humanoid robot capable of running with both legs in the air at the same time. Qrio could also hop, climb stairs, read aloud, dance, giggle, and play soccer. It memorized the appearance, voices, and preferences of its human playmates and could respond directly to them, which made it particularly popular with toddlers between 18 and 24 months.

Another robot with an entertainment character is RoboSapien, which was launched in 2004 by the Hong Kong toy robot manufacturer WoWee and sold 1.5 million units within a few months. The remote-controlled robot, which now comes in versions with a camera, MP3 player, PC connection, and even multiple selectable personalities, can respond to sounds and touch and perform up to 67 pre-programmable actions.
Just the following year, two teams made up of RoboSapiens competed against each other in the first global RoboCup soccer match between autonomous humanoid robots. RoboSapiens' successor, Roboraptor, has four adjustable basic moods that allow it to react differently to external stimuli via its sensors.
For the playful home use of robots, corresponding kits are now available at more affordable prices. Most models resemble primitive amphibians, dogs, armored cars, or other vehicles, and can be controlled by remote control. Some of their typical capabilities include facial recognition, navigation, and transporting objects. Many of the more advanced adult applications require programming skills.
When service robots get into trouble …
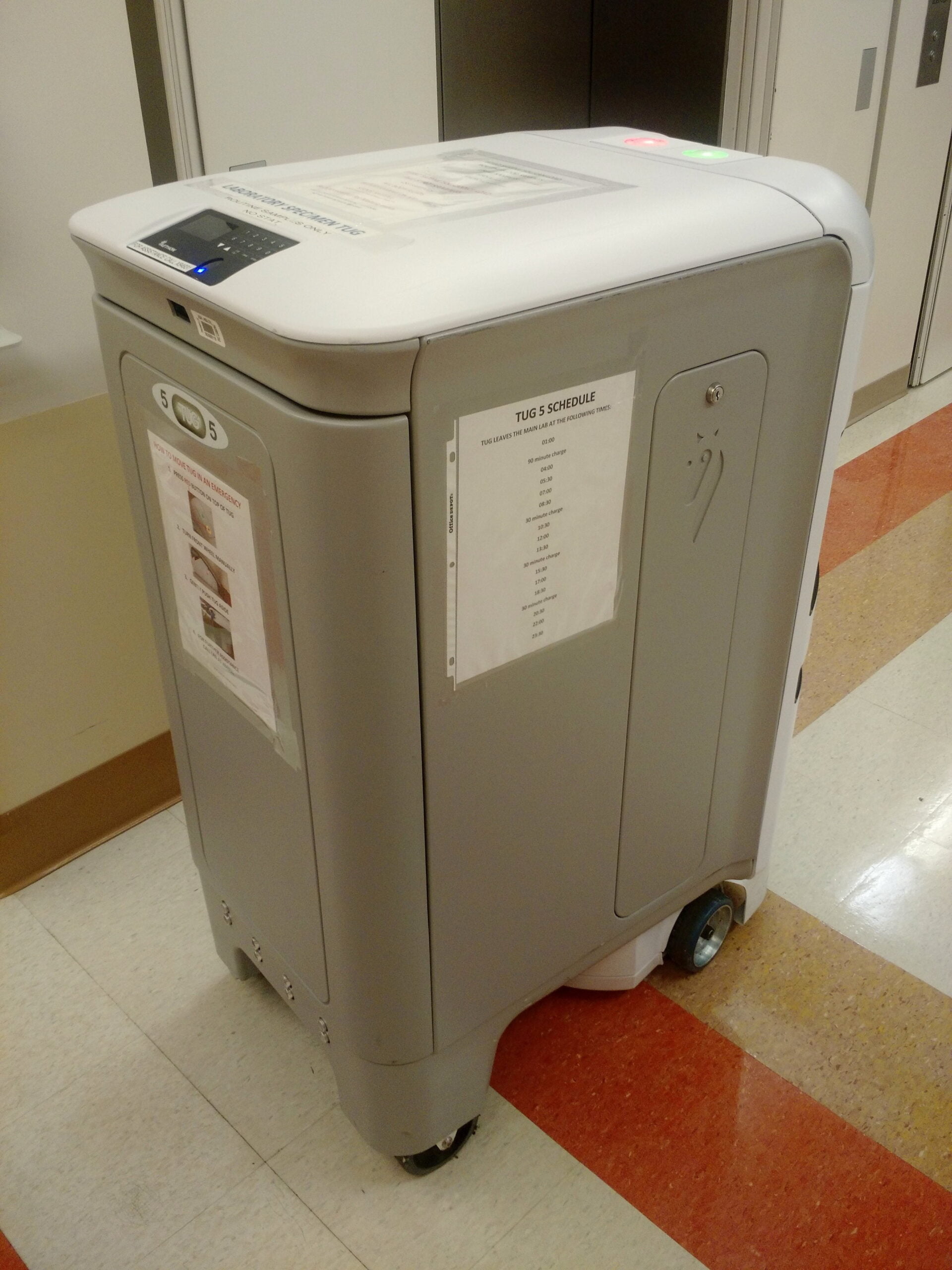
For more than a decade, industrious machine workers like Tug the Robot have populated hotels and hospitals, where they transport catering, bedding, medicines, or waste. They can communicate via WLAN with automatic elevators, fire alarms, and doors and have rudimentary language skills.
In many places, hotlines have been set up for such service robots, which they can call independently if their path in a hotel or hospital corridors is blocked by an insurmountable obstacle and there is no human nearby to help them.
The corona pandemic, in particular, has highlighted the importance of robots in the medical field: In a pandemic, robots are extremely helpful colleagues because, unlike humans, they do not get sick and can perform all those tasks that pose an acute danger to human hospital staff. This includes, for example, taking a fever or administering medication.
Supported by an intelligent machine, human caregivers will then have more time for those activities that robots may never be able to replace: developing conceptual solutions and providing empathic assistance to patients. But the corona pandemic has also shown, through the widespread crippling of the economy, that we are still far from being able to keep the world running on robots.

Incidentally, human-robot interaction has opened up a whole new branch called human-robot interaction (HRI). The safety claims in the HRI field are roughly based on the robot laws once formulated by Isaac Asimov, although the fields of robot and machine ethics now go far beyond these three simple principles in their complexity. For example, teaching caregivers to work well with artificial assistants has proven to be a challenge.
Boston Dynamics: robots go viral
In 2013, robotics company Boston Dynamics created its Atlas robot for the DARPA Robotics Challenge, an international robotics competition held between 2012 and 2015 to promote the development of robotic technologies in rescue operations.
Atlas can sense its surroundings thanks to several hundred sensors. While the robot's biggest challenge was initially to turn valves and open doors, the humanoid robot has since mastered even backflips.
Boston Dynamics is wowing people with cleverly staged videos of their latest robotic inventions. These videos released in 2018, for example, show how the dog-like robot Spot Mini holds the door open for another SpotMini and even manages to hold its own against a human attacker with a field hockey stick. Millions enjoy these videos on YouTube and the like.
To simulate real-world situations, Boston Dynamics usually first builds a digital version of their robot, trains it with data and video footage, and then tests the physical result in a lab environment. Only then is the robot unleashed on reality.
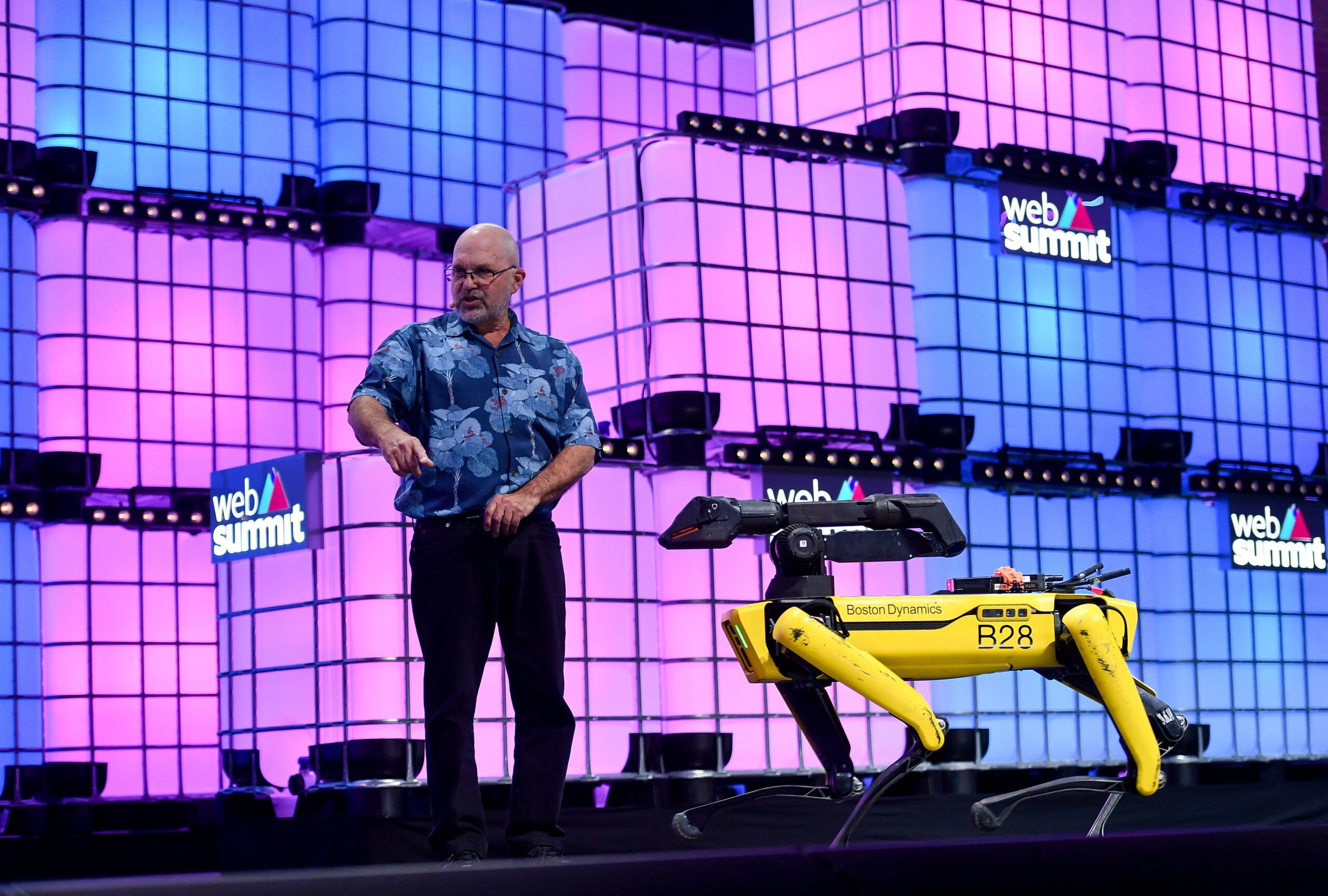
Meanwhile, the company, now largely owned by South Korea's Hyundai Motor Company, is mass-producing its quadruped Spot robot and first put it up for sale in 2020 for a sum of $74,500.
More than 75 companies, including the likes of SpaceX, are using Spot commercially. It has a range of capabilities and is already used semi-autonomously on construction sites, in mining, for planting seedlings in agriculture, or as a data collection machine, among other things. Together with his humanoid robot colleague Pepper, who specializes in reading human facial expressions, he has even been seen dancing as a baseball cheerleader.
Sensing the environment with sensitivity
Inventing everyday and household robots is arguably the biggest challenge in robotics. Unlike pre-programmed industrial robots that specialize in a single activity, everyday robots must find their way around unstructured, changeable environments and reliably perform a variety of tasks.
Future household robots, for example, will need to be sensitive to act to our advantage. Until recently, robots often lacked the necessary dexterity - simply holding a pen was impossible to manage, the soft skin of tomato was pressed in carelessly, eggs broke. But now, thanks to an improved sense of touch based on a multitude of sensitive sensors, robots have mastered the palpation of different surfaces and the precise grasping of objects of all kinds.
For example, robot engineers at the Technical University of Munich have developed a sensitive artificial skin that allows robots to sense touch, and researchers at the University of Southern California have produced a tactile artificial hand that can register a wide variety of materials. The companies SynTouch and Meta also developed robotic fingertips and a tactile artificial skin that can distinguish a spectrum of sensations from temperature to surface texture.
Google's parent company Alphabet is also developing robots that can learn: in December 2019, the company unveiled its Everyday Robots project. While the first prototype was only capable of sorting garbage, newer models on the Google campus now adjust chairs, wipe down tables, collect cups, and open doors.
Opening doors or moving chairs - 033 performs both tasks with just one algorithm. | Video: Alphabet
With reinforcement learning to new capabilities
For everyday robots to grow out of their primitive stage and provide practical benefits, they need to act more autonomously and learn more independently. In 2015, for example, UC Berkeley laboratory-developed Brett (short for Berkeley Robot for the Elimination of Tedious Tasks), a robot that used reinforcement learning to teach itself the shapes of different objects and then insert these puzzle-pieces into the corresponding holes, similar to a toddler.
In the innovative RL method, a digital version of the robot is first built, and the given problem is simulated visually, allowing the learning process to be observed. Only then is the programmed physical robot peppered with this knowledge in the lab, trained, and, after successful testing, can be used in the real world. Simulation in a perfect environment has the advantage that trial-and-error steps can be carried out and tested more quickly than in real life.
Using this learning scheme, a bipedal AI, for example, self-learned how to race: In a computer simulation, the human-like object, equipped with two arms and two legs, was simply told to move forward as fast as possible without having been fed locomotion data beforehand - according to conventional procedures. After some initial stumbling attempts, the virtual biped actually started walking and eventually even taught itself to run.
Video: In a simulation, Google's AI company Deepmind gave the bipedal AI the task of moving from point A to point B. The AI then learned how to run. Thanks to reinforcement learning, the AI eventually learned to walk and overcome obstacles according to the trial-and-error principle - even if the movements may sometimes seem a bit unusual to us humans.
A similar achievement based on this new approach was recently featured at Oregon State University: Using RL algorithms, the robot Cassie taught itself to walk without having previously learned to do so through direct programming or imitation.
Robot development: the next steps
The superficially advanced capabilities of humanoid robots often belie their limitations. They make us forget that, despite everything, we are dealing with programmed, uncreative, purely mechanical creatures.
Even though robots are becoming more intelligent by the day, a lot of human help is still needed until they have learned and can carry out more demanding activities independently. Only then will they be able to learn independently and continuously through observation, interaction, and communication and actively participate in our lives.
So, an important next step is for the simulated algorithm to learn how to learn - without programmers having to make manual improvements. Otherwise, we would have to take our self-built machines by the hand forever, without them ever acting autonomously and actually being useful in our changeable and chaotic world.
Video: Deceptively similar? The robot Ameca, recently developed by the UK company Engineered Arts, surprises with its fluid facial expressions that appear almost human.
In this context, further questions arise: How much power are we willing to surrender to autonomous machines? Who is liable for supposedly wrong decisions made by a robotic AI? Will robots soon take over our jobs?
Despite justified concerns that robots could lead to a social and existential crisis for humans, it is equally possible that humans and machines will one day coexist harmoniously, and that most activities will not be entirely replaced by robots, but profitably accompanied by them.
Conclusion: 100 years of robotics - progress is faster than you think
Robots are already living among us: as autonomous vacuum cleaners, lawnmowers, personal assistants, service and care robots, or for entertainment purposes, they have become indispensable in many areas of our daily lives. But there is still enormous potential for progress.
So let's imagine a humanoid robot in our homes that is affordable for everyone and combines all the skills described here: It vacuums, cleans up, precisely sorts our garbage, parlays intelligently and entertainingly in several languages, can walk smoothly, carry objects, climb stairs, play music and dance, and even masters elegant stunts like somersaults. His facial expressions are as realistic as a human's. He learns new things by us giving him a target without having to train him.
How long will it be before we succeed in imitating the miracle that is a man in such a perfected form? How long before this robotic buddy at our side becomes a reality? Given the rapid development from the mere creation of words a hundred years ago to the recent AI-driven discovery of walking, it may be sooner than we think.