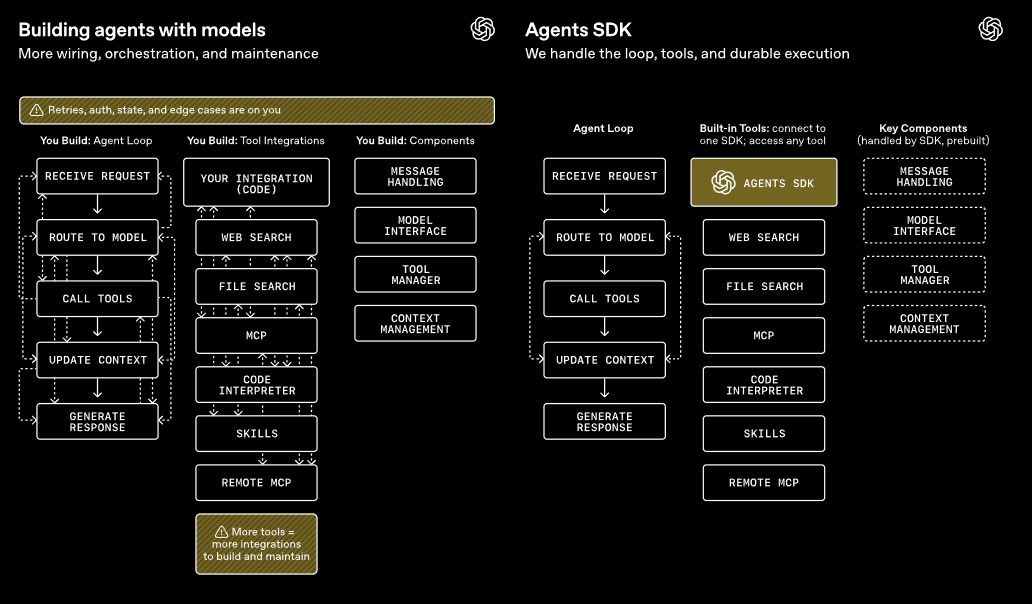
Adobe is introducing the Firefly AI Assistant, which handles complex creative workflows across Photoshop, Illustrator, Premiere, and Lightroom through a single chat interface. Users describe what they want in plain language, and the assistant runs through the necessary steps automatically, though they can jump in and make changes at any point.
"Creative Skills" lets users kick off multi-step processes with a single command, like adapting an image for multiple social media platforms at once. Adobe also plans to connect it to chat platforms like Anthropic's Claude. A public beta is expected to ship in the coming weeks. The assistant builds on "Project Moonlight," a prototype Adobe demoed at Adobe MAX.
Adobe is also expanding Firefly with AI-powered video and image editing tools, including audio cleanup, advanced color controls, and image adjustments. The platform now supports more than 30 AI models, including Kling 3.0.